ゼロからのROS入門
ロボットモデルの表示
大阪大学 中島優作
本スライドのゴール
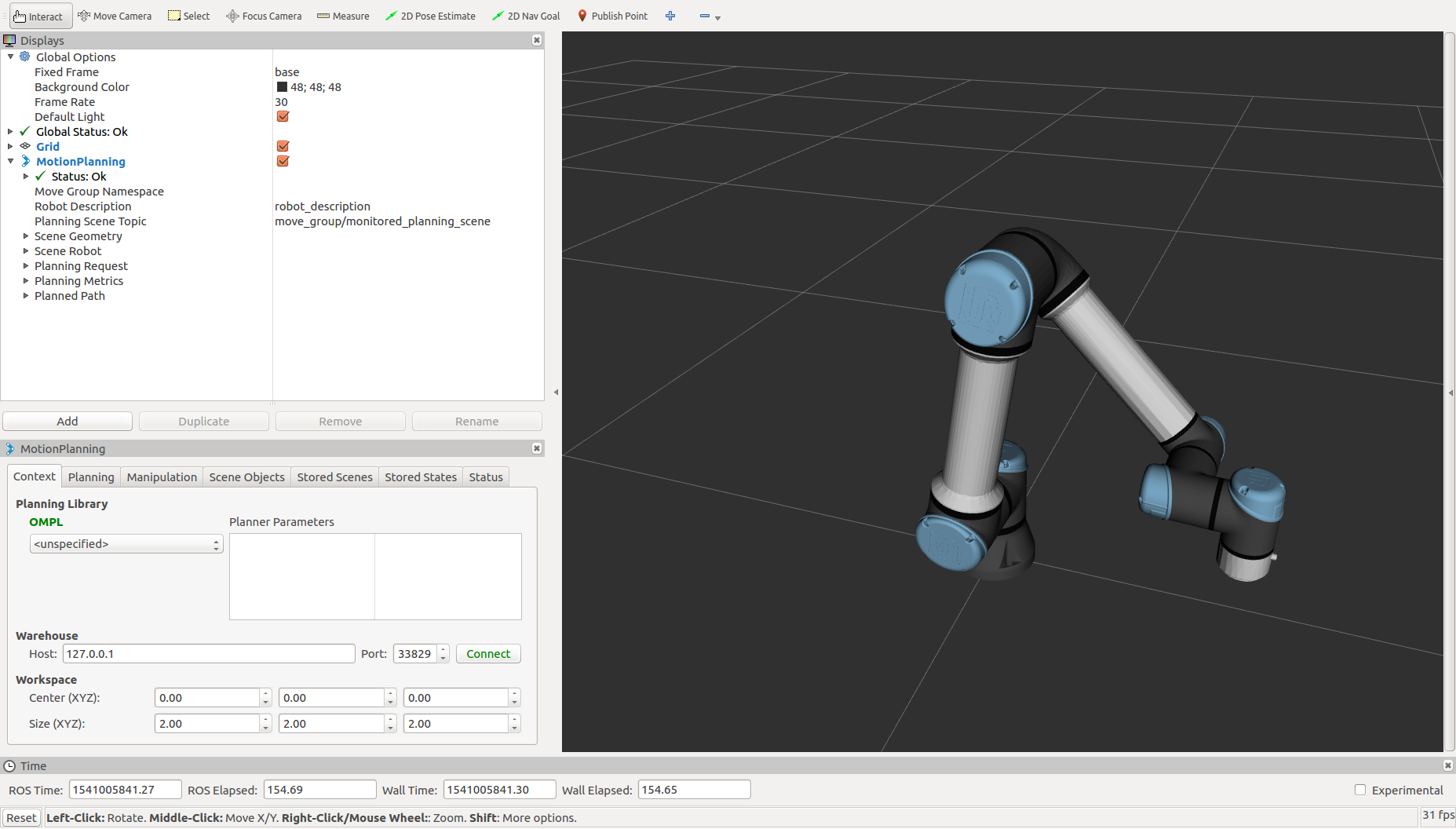
- 左にようにロボットモデルをRviz上に表示できるようになる
- モデルがすでにある人、先に動作生成をやりたい人→アーム位置制御とモーションプランニング
- 環境構築がまだの方は→環境構築はこちら
Rvizとは?
勉強用のパッケージ作成
catkin_create_pkg ros_study rospy
- catkin_ws/src内でまずは作業用のパッケージを作成(名前は任意ですがここでは"ros_study"とします)
- これから先のスクリプトは全てこの中で作成します
まずはURDFを表示
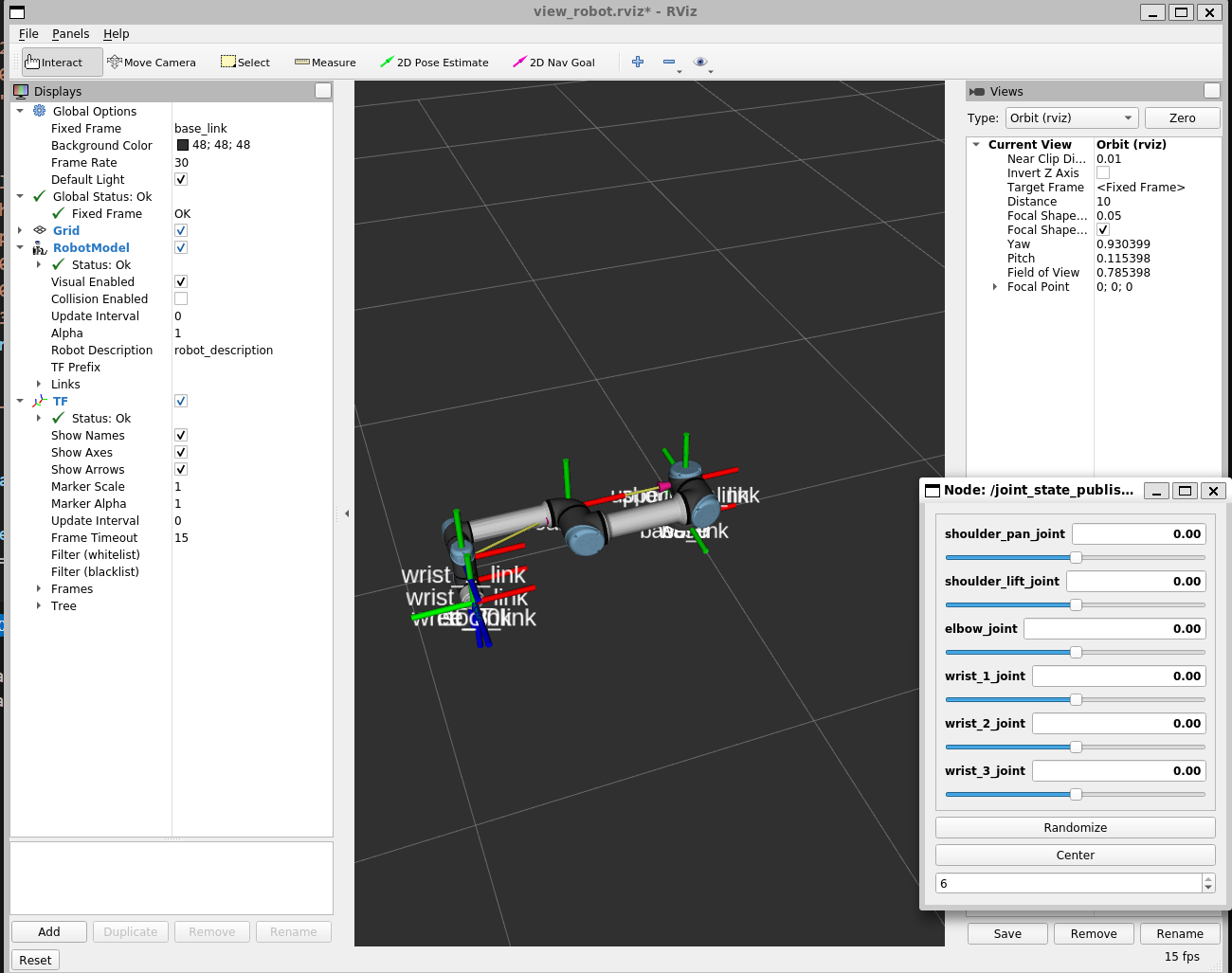
このような画面になればok
右下のGUIで関節を動かせます
ロボットコントローラはここでは動作していません、GUIは表示を直接操作しているだけです
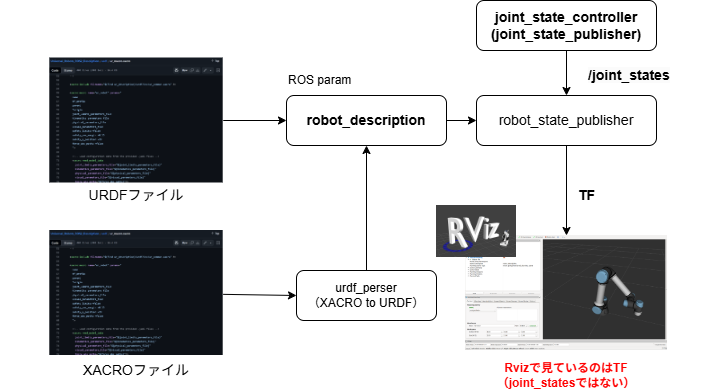
ロボットモデルを表示するまでの流れ
- ステップ1:URDFでロボットモデルを書く
- ステップ2:URDFを読み込ませて表示
ロボットモデル表示の全体像
ステップ1:URDFの書き方
ロボットアームの構造
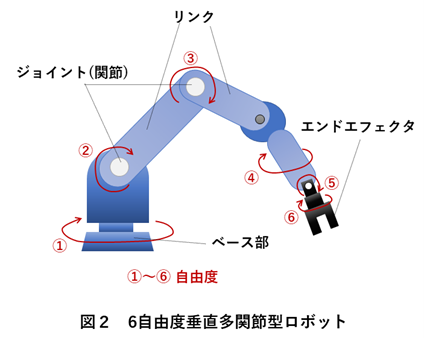
- ジョイント(関節):
モーターが動く部分 - リンク:
ジョイントを繋ぐ部分 - エンドエフェクタ(手先効果器):
作業をする手先
この構造をファイルに落とし込んだのがURDF↓
URDF(Unified Robot Description Format)
Ur5eの例
URDF(Unified Robot Description Format)
VS Codeで折りたたんだ
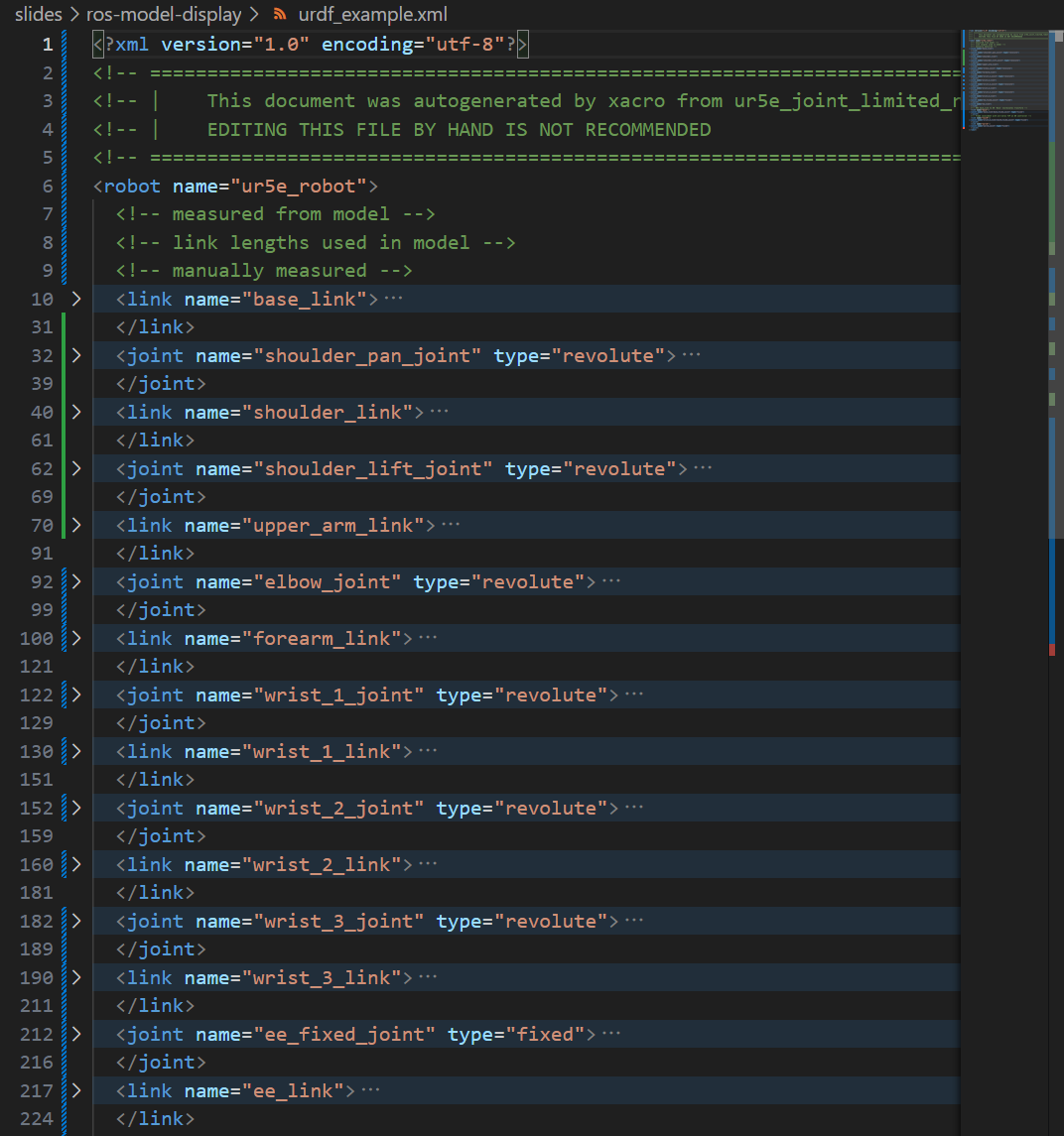
←よく見るとlinkとjointが並んでいるだけ
XACRO(XML Macros for Robots)
エンドエフェクタを追加したい
標準リンク名
ROSでよく使うリンク(慣習であって絶対ではない)
- base_link: ROSのベース座標系
- world: Gazebo等のシミュレータのベース座標系
ROS-industrialの標準リンク(産業用ロボットとの互換性を持たせるために決められている)
- base: 産業用コントローラのベース座標系
- tool0: 産業用コントローラのデフォルトツール座標系
- flange: エンドエフェクタ取り付け用フレーム(REP 103準拠、x+が前方)
ジョイントの要素
~type(動作の種類)~
- revolute: 回転関節(角度制限あり)
- continuous: 連続回転関節(角度制限なし)
- prismatic: 直動関節
- fixed: 固定関節(動かない手先とかで使用)
ジョイントの要素
~リンクとのつながりと制限~
- parent/child: 親リンクと子リンクの指定
- origin: 親リンクからの位置・姿勢
- axis: 回転軸の方向ベクトル
- limit: 動作範囲、トルク、速度の制限
リンクの要素
~visual(表示用)~
- geometry: 形状(box, cylinder, sphere, mesh)
- CADデータ→daeやstlにしてmeshで表示することが多い
- material: 色・材質
- origin: リンク座標系からの位置・姿勢
リンクの要素
~collision(干渉計算用)~
- 干渉計算は重い!モーションプランニング計算量の半分以上は干渉計算
- 通常はvisualより簡単な形状(よく使うのは円柱とか)を使用し計算量を削減
ジョイントの物理属性
※物理シミュレータを使わないなら記述不要
- Dynamics
- friction: 静摩擦[N or N/m]
- damping: 減衰値[Ns/m or Nms/rad]
リンクの物理属性
※物理シミュレータを使わないなら記述不要
- 慣性パラメータ ~inertial~
- mass: 質量
- ixx, iyy, izz: 主軸周りの慣性モーメント
- ixy, ixz, iyz: 慣性乗積(通常は0)
- CADソフトの計算値や実測値を使う
リンク間相互作用
※物理シミュレータを使わないなら記述不要
- contact_coefficients
- リンクが相互に接触している時のリンクの動作
- mu: 摩擦係数
- kp: 剛性係数
- kd: 減衰係数
ステップ2:URDFの表示のlaunchファイル
launchファイルの解説
<launch>
<arg name="model" default="$(find grinding_descriptions)/urdf/ur/ur5e.urdf"/>
<param name="robot_description" command="$(find xacro)/xacro '$(arg model)'" />
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
</launch>
このような対応関係になっている
TF
Rvizで表示しているTFとは?↓
TFとは?
- TF = Transformの略
- ROS標準搭載のシステムで、座標変換と座標管理の2つの機能がある
- 実際はTFの改良版のTF2を使う
機能1:座標変換
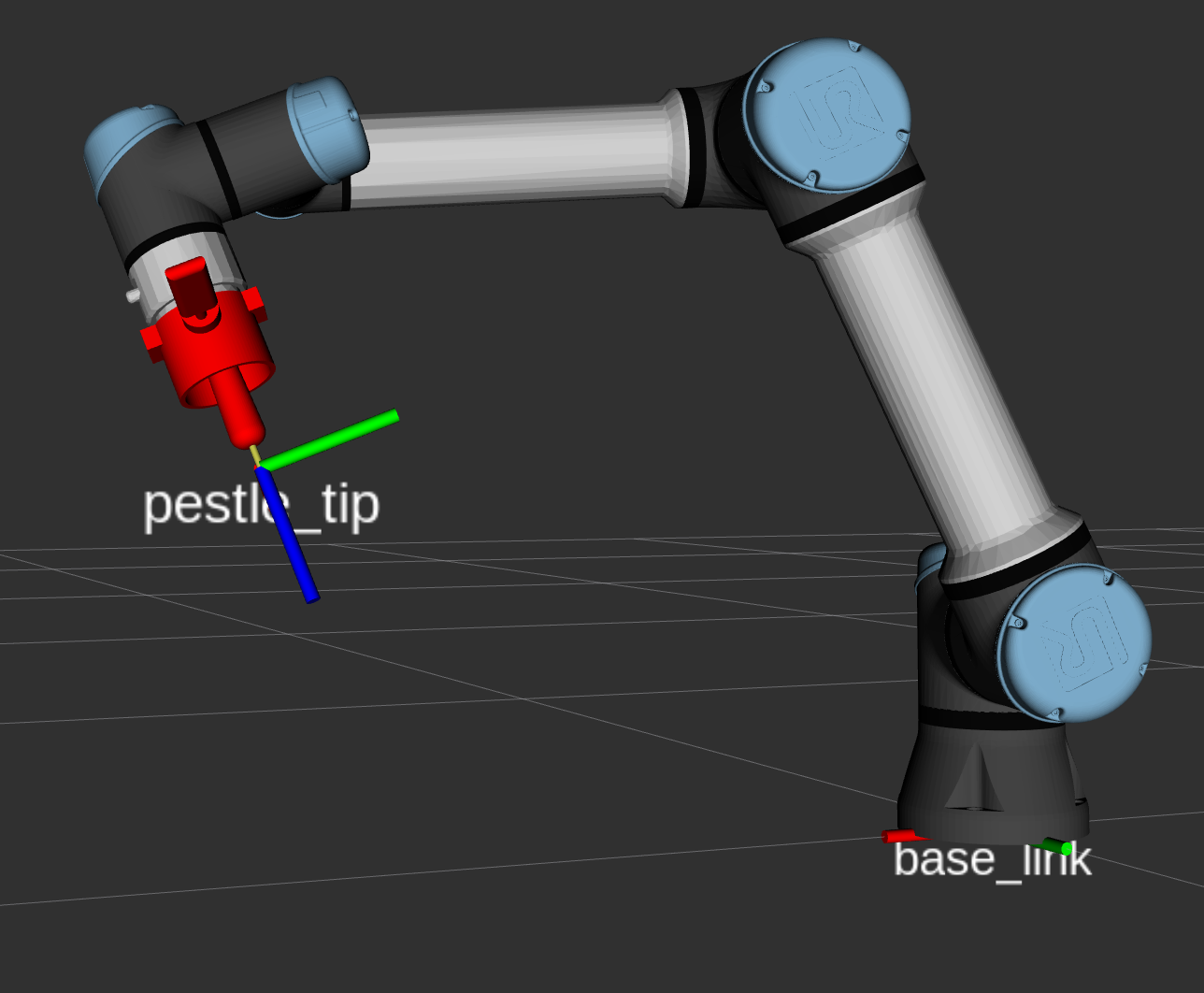
baseから見た乳棒手先
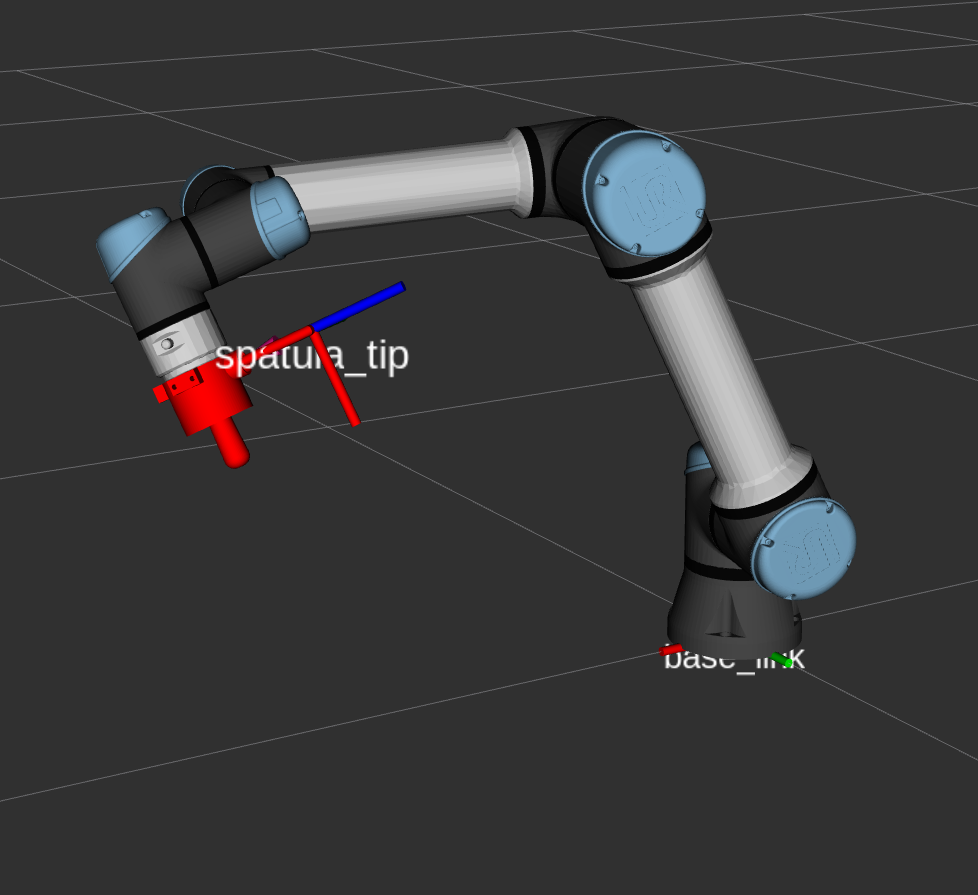
baseから見たヘラの手先
- ここではTCPの座標変換を示したが、TFで管理された座標系であれば任意の座標変換が可能
座標変換の仕組み
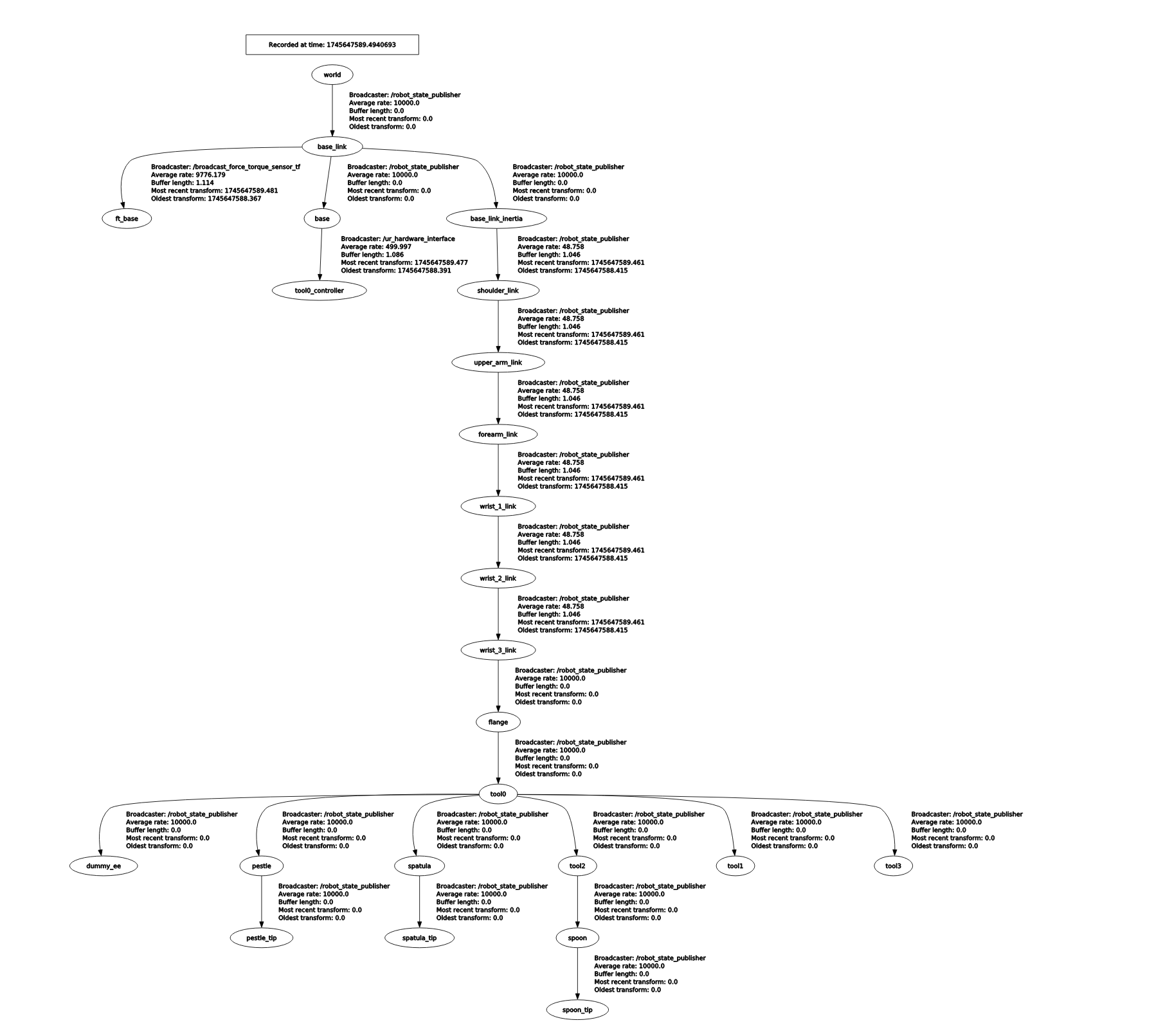
- TFはツリー構造になっている
- 同姿変換行列で順々にツリーを辿って座標変換を計算
機能2:座標管理
ロボットモデルの数式表現
- ロボットの構造を行列で表現する方法としてDHパラメータがあります
- URDFで読み込んだロボットの制御の裏ではDHパラメータを使って計算しています
DHパラメータとは?↓
DHパラメータとは?
※厳密には修正DHパラメータです