Public Materials
This page collects publicly available study materials and notes related to my work.
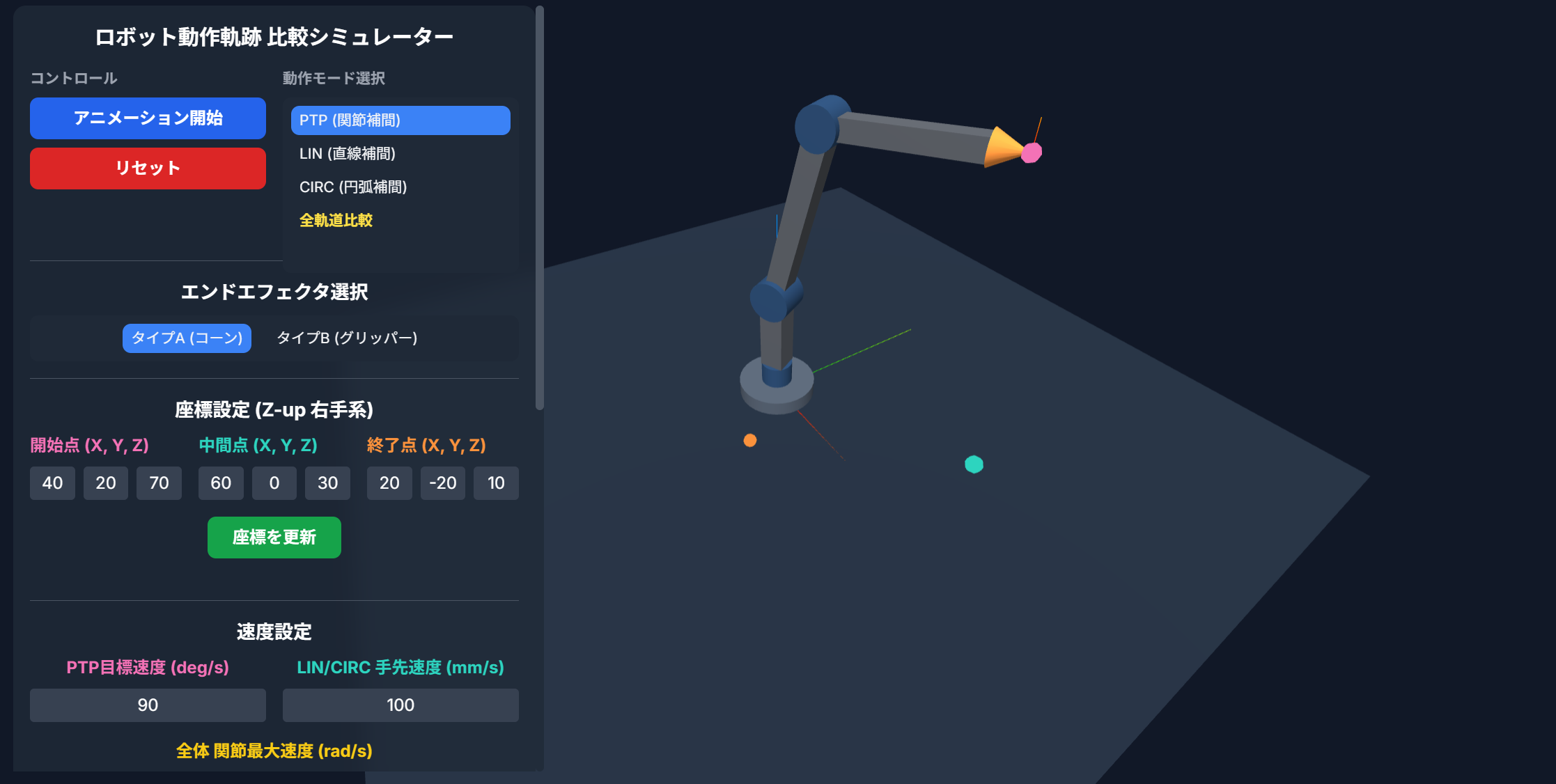
zero_ros
Practical slides covering topics from robot arm fundamentals needed for laboratory automation to advanced robot control (trajectory control) using ROS.
These slides are designed to be learned interactively on the web while running examples directly in the browser. Sorry, this material is currently available only in Japanese. They were adapted and published based on materials originally used for an in-lab robot arm study session held in August 2025.